Steer-by-Wire

Steer-by-Wire-Lenksysteme
effiziente Fahrzeugsteuerung via Kabel und elektrischer Signale
Was einst als Konzept begann, ist heute beeindruckende Realität, die sich stetig weiterentwickelt. Die Übertragung von Lenksignalen über Kabel statt durch mechanische Verbindungen - Steer-by-Wire. Als technologischer Marktführer haben wir in den letzten 50 Jahren zahlreiche Steer-by-Wire-Lenksysteme für Industriefahrzeuge und Sonderanwendungen erfolgreich realisiert.
Unsere neueste Generation von Sicherheits-Lenkcomputern (Steuergeräten) wurde gemäß ISO 26262 entwickelt. Dadurch können auch Fahrzeuge, die für den öffentlichen Straßenverkehr zugelassen sind, mit unseren Steer-by-Wire-Lenksystemen ausgestattet werden – ein bedeutender Meilenstein in der Entwicklung der Steer-by-Wire-Technologie.
Erleben Sie die Zukunft der Lenksysteme mit MOBIL ELEKTRONIK – insbesondere mit unseren praxiserprobten EHLA®-Lenksystemen, die neue Maßstäbe in der Fahrzeuglenkung setzen.
Vorteile Steer-by-Wire-Lenksysteme
Steer-by-Wire-Lenksysteme sind nicht nur die Basis für autonom fahrende Fahrzeuge, sondern bieten schon heute einen erheblichen Mehrwert gegenüber konventionellen Lenksystemen.
Überzeugen Sie sich selbst:
- Höchstes Maß an Sicherheit durch redundante Systemkonzepte
- Reduzierung von Komplexität durch Standardisierung
- Erhöhte Sicherheit durch mögliches Zusammenspiel von Assistenzsystemen
Branchen
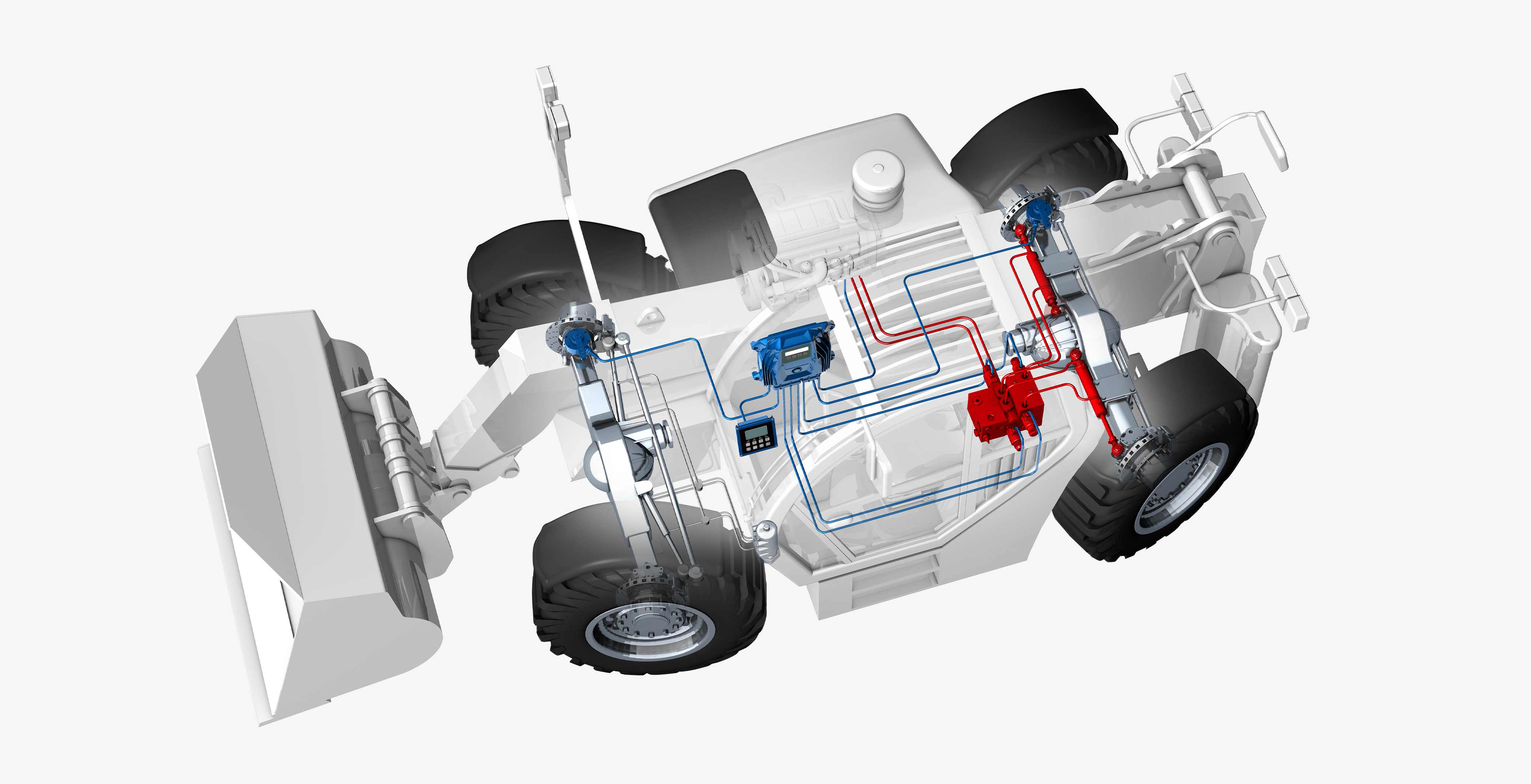
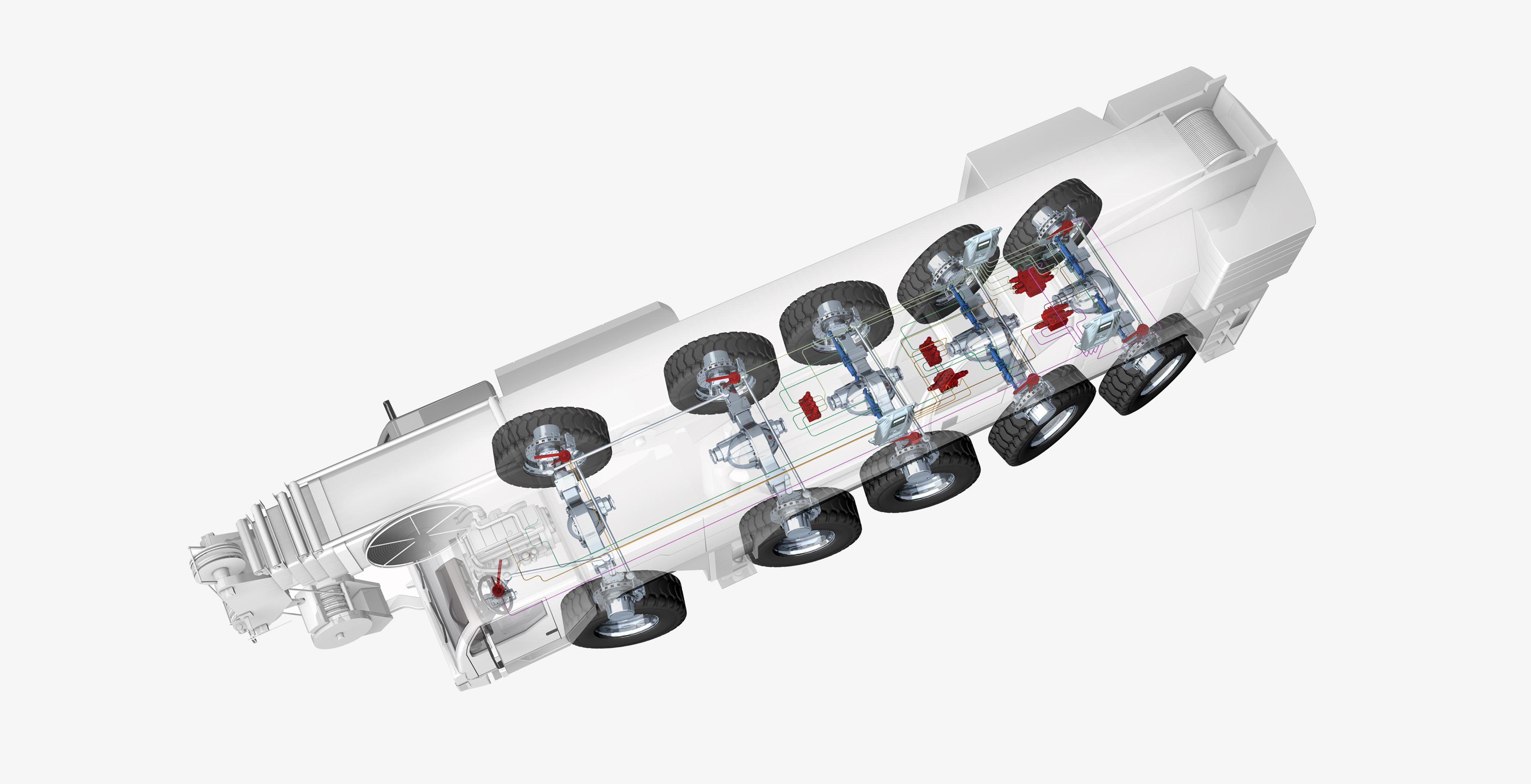

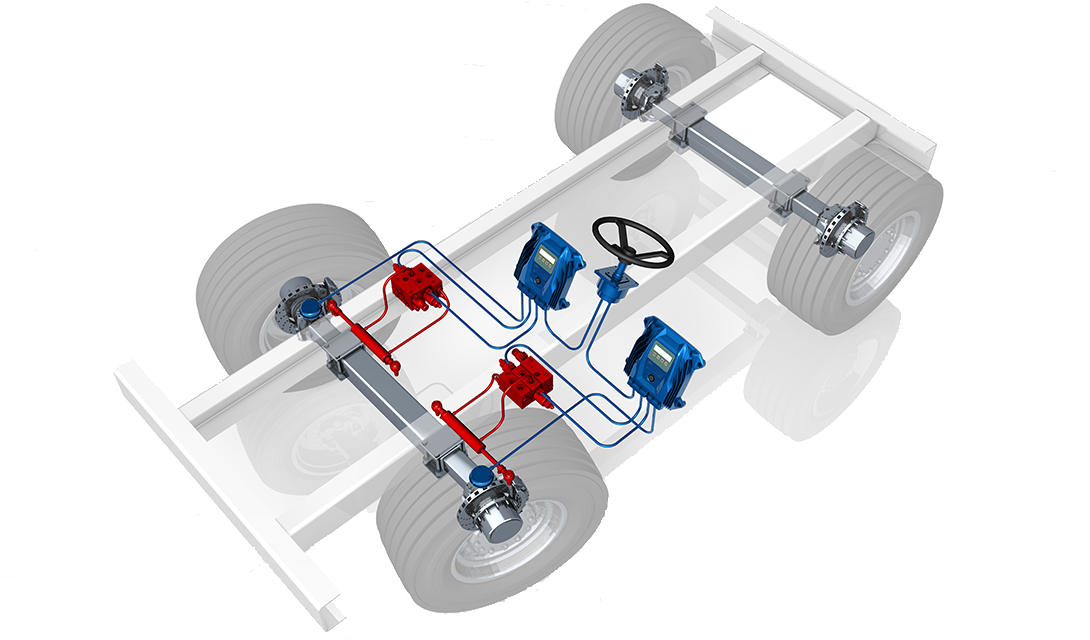
Unser patentiertes Steer-by-Wire-Lenksystem EHLA® –
für überlegene Fahrdynamik und Präzision
Erleben Sie die Zukunft der Fahrzeugsteuerung mit EHLA® – unserem revolutionären Steer-by-Wire-Lenksystem. Hier gibt es keine mechanischen Lenkverbindungen mehr, stattdessen kabelgebundene Präzision und höchste Sicherheit. MOBIL ELEKTRONIK macht’s möglich!
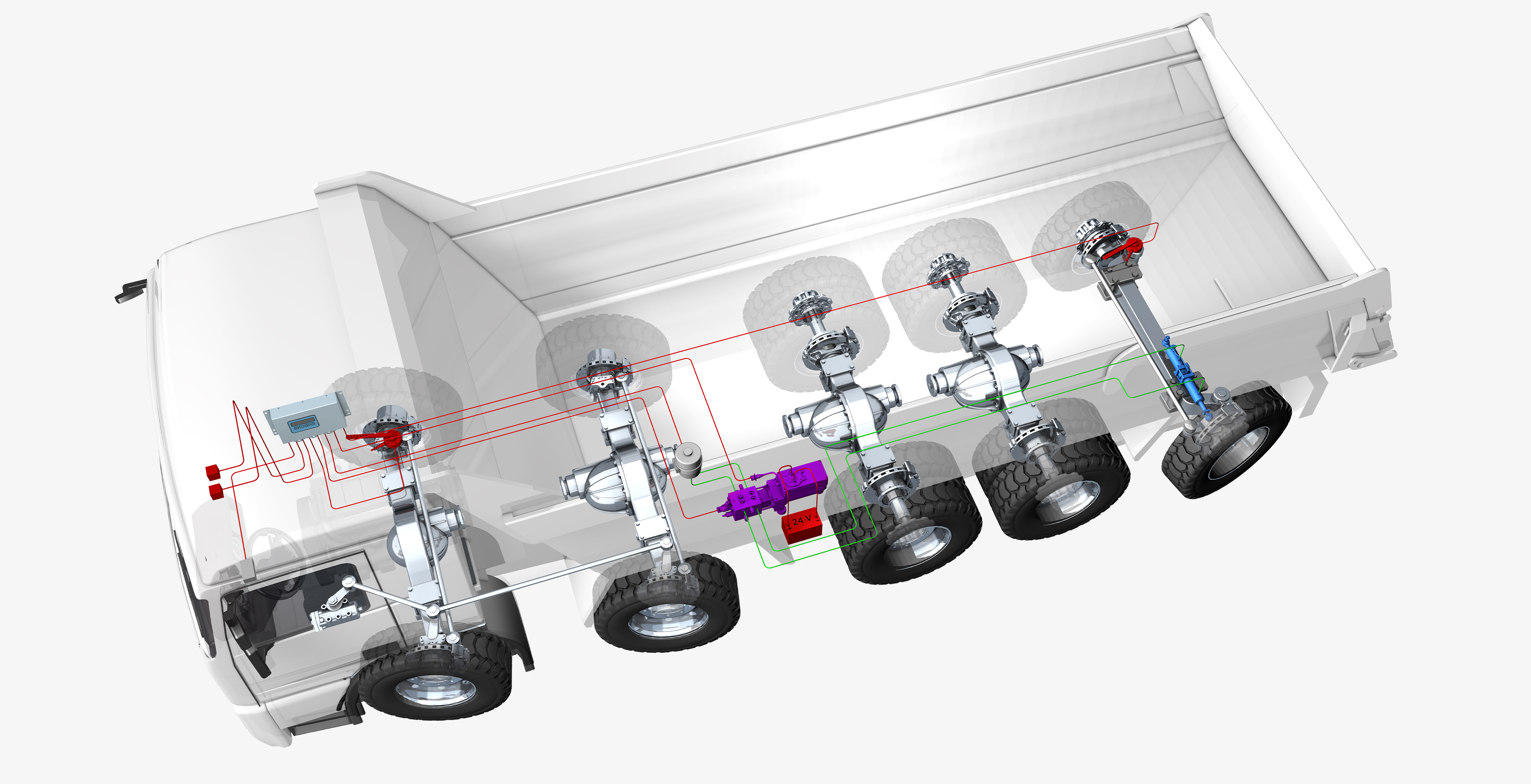
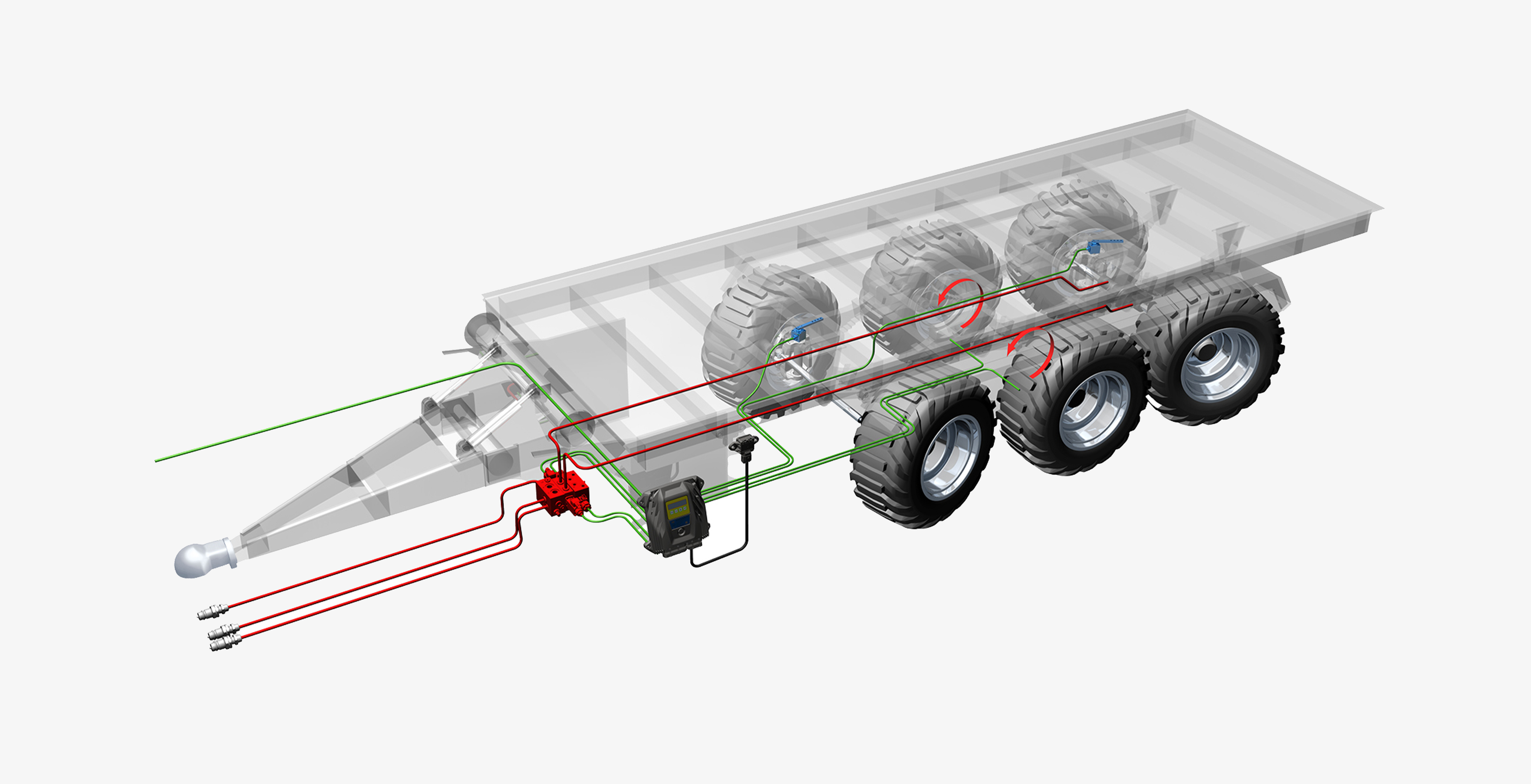
Für jedes Fahrzeug das passende EHLA®-System
Jedes Fahrzeug ist einzigartig, auch wenn sich die Geometrie nur geringfügig unterscheidet.. Unsere EHLA®-Lenksysteme sind flexibel ausgelegt. Über Parameter werden wichtige Stellgrößen der Lenksysteme an die unterschiedlichen Geometrien angepasst. Bei der Konzeption Ihres Lenksystems setzen wir auf bewährte Standardkomponenten, die bereits erfolgreich in der Serienproduktion eingesetzt werden.
ISO-zertifizierter Prozess
Unabhängig von der Anzahl der zu steuernden Achsen steht Ihnen eine breite Palette unterschiedlicher EHLA®-Lenksysteme zur Verfügung. Ein ISO 26262-konformer Prozess für unsere hochwertigen Elektronikkomponenten ist eines der Grundprinzipien unserer Entwicklung. Dabei bewahren wir größtmögliche Flexibilität, um Ihre individuellen Kundenanforderungen in jeder Hinsicht hundertprozentig zu erfüllen.
Höchster Sicherheitsstandard: ASIL D
Es liegt in der Verantwortung des Fahrzeugherstellers, selbst eine umfassende Gefahrenanalyse und Risikobeurteilung durchzuführen. Daraus ergeben sich die spezifischen Sicherheitsanforderungen an das EHLA®-Lenksystem. Mit der neuesten Generation unserer hochmodernen Sicherheits-Lenkcomputer können Sicherheitsfunktionen bis zum höchsten Standard ASIL D realisiert und gewährleistet werden.
Funktionale Sicherheit
Die Anforderungen der ISO 26262 stellen unsere Kunden oft vor große Herausforderungen. Mit unserem Know-how auf diesem Gebiet und unserer über 50-jährigen Erfahrung in der Auslegung von EHLA®-Lenksystemen stehen wir Ihnen dabei gerne zur Seite. Zögern Sie nicht, uns nach einem Workshop zu Themen wie Funktionale Sicherheit, HARA (Hazard Analysis and Risk Assessment) und Safety Concept zu fragen.
Cybersecurity
Die Gewährleistung der Sicherheit in einer zunehmend vernetzten Welt ist zweifellos das große Thema der Zukunft. Dies gilt auch in hohem Maße für die Automotive-Industrie. Fahrzeuge sind längst nicht mehr nur schlichte Fortbewegungsmittel, sondern hochtechnisierte Computer auf Rädern, anfällig für potenzielle Hackerangriffe. Jedes Fahrzeug muss Cyber-Angriffen standhalten können, um die Sicherheit aller Verkehrsteilnehmer zu gewährleisten.
Die gute Nachricht: Die Lenksysteme von MOBIL ELEKTRONIK werden auch höchsten Ansprüchen an die Cybersicherheit gerecht.
Vorteile EHLA®-Lenksysteme
Individuelle Lenksysteme für Ihre Bedürfnisse
Unsere EHLA®-Lenksysteme bewähren sich seit vielen Jahren erfolgreich in Kundenfahrzeugen unterschiedlicher Einsatzklassen und zeichnen sich durch einen nachweisbaren Mehrwert im Praxiseinsatz aus. Vertrauen Sie auf unsere Erfahrung und Kompetenz, um die Lenkung Ihrer Fahrzeuge auf ein neues Niveau zu heben.
- Ultimative Manövrierfähigkeit für präzises und leichtes Lenken
- Gewährleistung höchster Standards für maximale Sicherheit
- Flexible Individualisierung der Lenksysteme durch Einsatz von Sonderprogrammen
Unser EHLA®-Portfolio
Maßgeschneiderte Lenksysteme für Ihre Anwendung
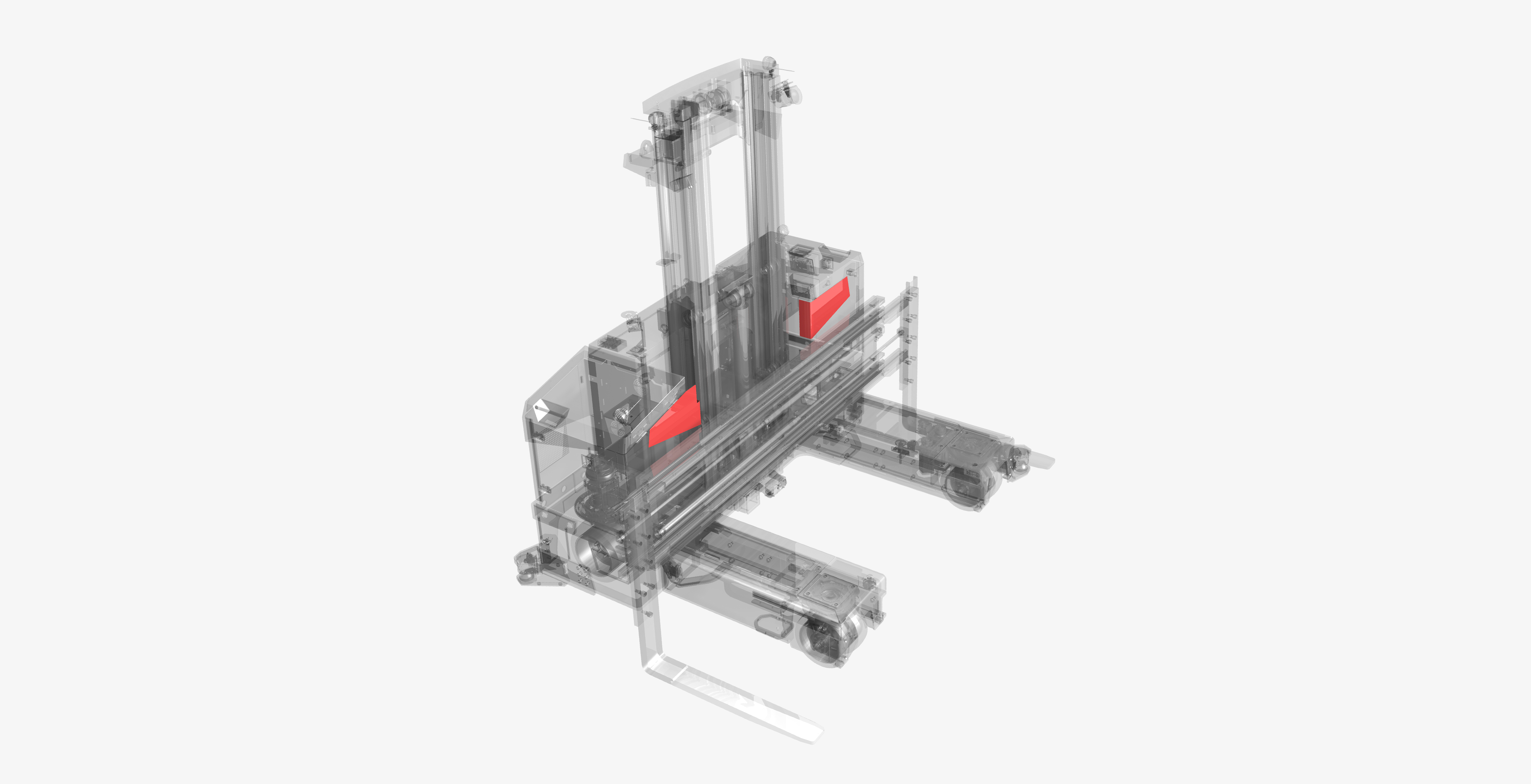
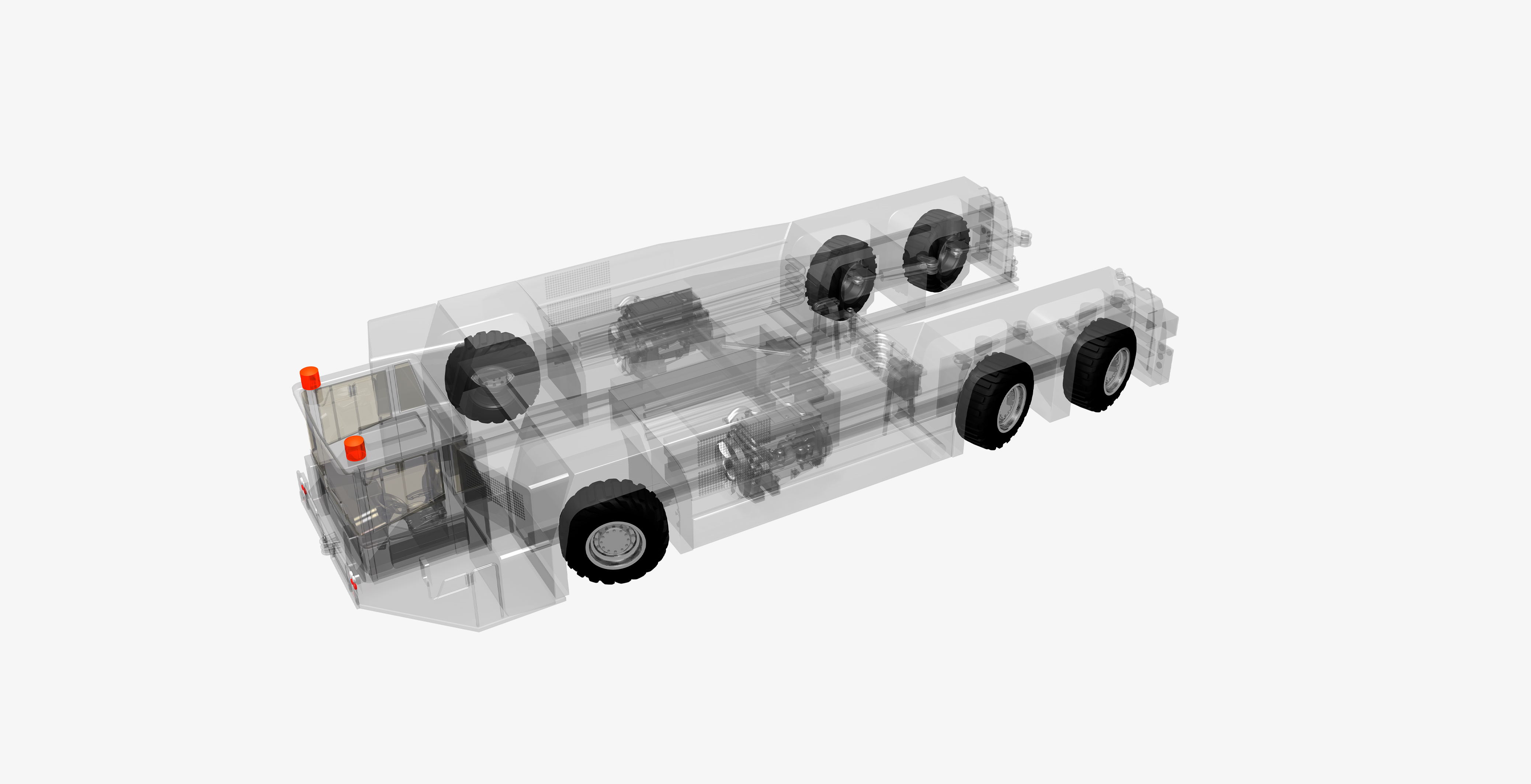
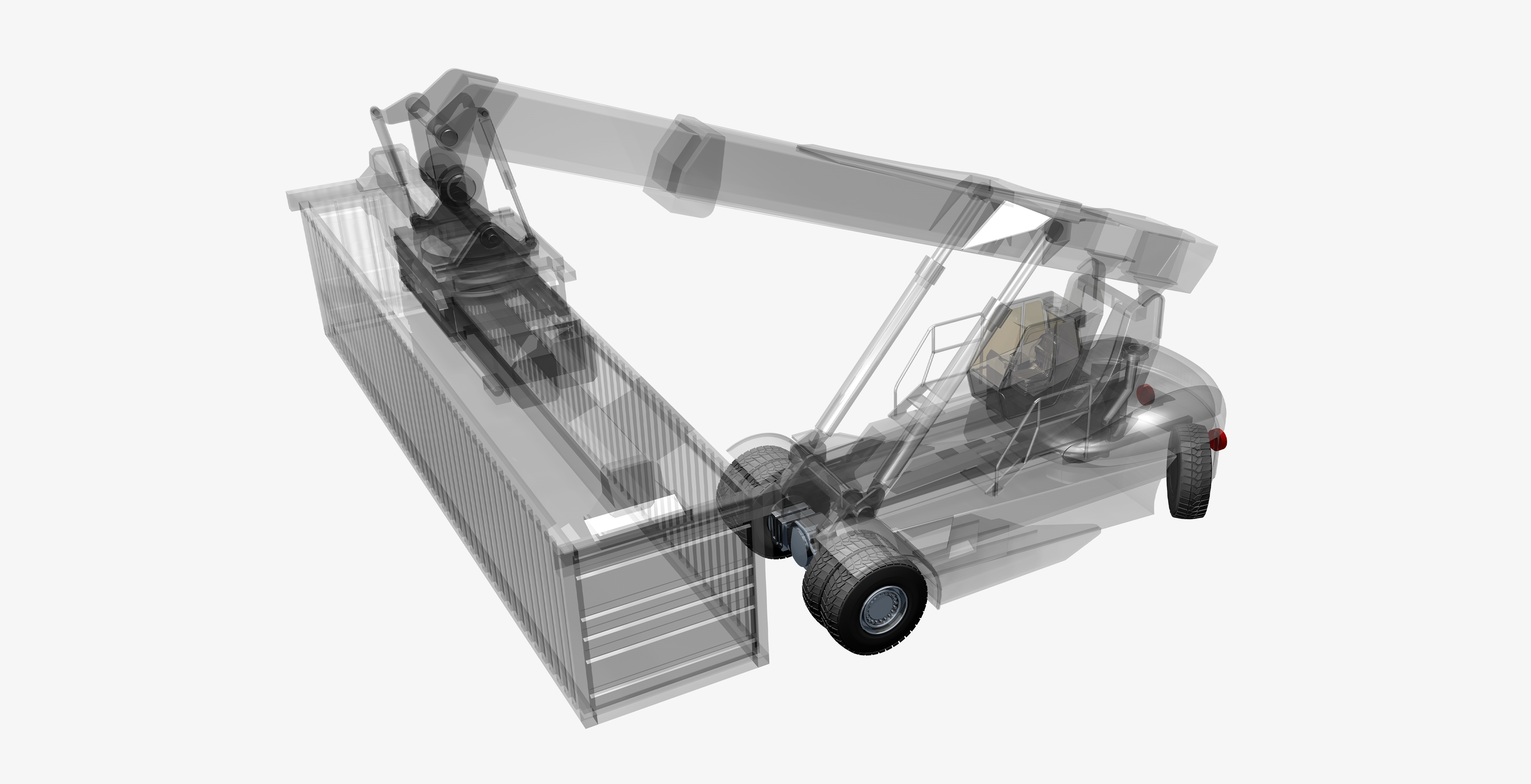
Unsere EHLA®-Produktpalette basiert auf der bahnbrechenden Steer-by-Wire-Technologie. Der einzigartige Vorteil für Sie: Wir können für jede erdenkliche Anforderung eine maßgeschneiderte EHLA®-Lösung anbieten.
Unsere EHLA®-Systeme bewähren sich seit vielen Jahren erfolgreich in Kundenfahrzeugen verschiedener Anwendungsklassen und haben sich im praktischen Einsatz durch einen nachweisbaren Mehrwert ausgezeichnet.
Ganz gleich, ob es darum geht, die Achse in die Geradeausfahrt zu bringen oder das Fahrzeug im Fehlerfall sicher abzustellen – auf unser EHLA®-Lenksystem können Sie sich immer 100%ig verlassen.
EHLA®-Varianten







Kontaktieren Sie uns!
Wir freuen uns auf Sie und Ihr Anliegen
